MicroPython का व्यापक रूप से माइक्रोकंट्रोलर्स और एम्बेडेड सिस्टम के साथ उपयोग किया जाता है। हम MicroPython IDE के अंदर कोड और लाइब्रेरी लिख सकते हैं और कई सेंसर को इंटरफ़ेस कर सकते हैं। यह राइटअप आपको HC-SR04 सेंसर के साथ ESP32 का उपयोग करके दूरी मापने में मार्गदर्शन करेगा।
MicroPython का उपयोग कर HC-SR04 अल्ट्रासोनिक सेंसर के साथ ESP32
अल्ट्रासोनिक के साथ ESP32 को जोड़ने के लिए बस दो तारों को जोड़ने की आवश्यकता होती है। अल्ट्रासोनिक सेंसर का उपयोग करके, हम वस्तु की दूरी को माप सकते हैं और इस प्रणाली के आधार पर प्रतिक्रियाओं को ट्रिगर कर सकते हैं जैसे कि वाहन टक्कर से बचने वाली प्रणाली।

MicroPython का उपयोग करना जो ESP32 और अन्य माइक्रोकंट्रोलर्स के लिए डिज़ाइन की गई भाषा है, हम कई सेंसर जैसे इंटरफ़ेस कर सकते हैं कोर्ट-SR04 . MicroPython कोड लिखा जाएगा जो सोनार तरंग द्वारा सेंसर से ऑब्जेक्ट तक और वापस ऑब्जेक्ट तक पहुंचने में लगने वाले समय की गणना करता है। बाद में दूरी सूत्र का उपयोग करके हम वस्तु की दूरी की गणना कर सकते हैं।
यहाँ HC-SR04 सेंसर की कुछ मुख्य झलकियाँ दी गई हैं:
| विशेषताएं | मूल्य |
| प्रचालन वोल्टेज | 5 वी डीसी |
| चालू बिजली | 15mA |
| कार्यकारी आवृति | 40 Khz |
| मेरी सीमा | 2 सेमी / 1 इंच |
| मैक्स रेंज | 400 सेमी / 13 फीट |
| शुद्धता | 3 मिमी |
| मापने का कोण | <15 डिग्री |
HC-SR04 पिनआउट HC-SR04 में निम्नलिखित शामिल हैं चार पिन:
- वीसीसी: ESP32 विन पिन से कनेक्ट करें
- गोंड: जीएनडी से कनेक्ट करें
- ट्रिग: ESP32 बोर्ड से नियंत्रण संकेत प्राप्त करने के लिए पिन करें
- गूंज: बैक सिग्नल भेजें। माइक्रोकंट्रोलर बोर्ड समय का उपयोग करके दूरी की गणना करने के लिए यह संकेत प्राप्त करता है

अल्ट्रासोनिक कैसे काम करता है
HC-SR04 सेंसर ESP32 के साथ कनेक्ट होने के बाद एक सिग्नल पर ट्रिग बोर्ड द्वारा पिन जनरेट किया जाएगा। एक बार HC-SR04 सेंसर के ट्रिगर पिन पर सिग्नल प्राप्त होने के बाद एक अल्ट्रासोनिक तरंग उत्पन्न होगी जो सेंसर को छोड़ देती है और ऑब्जेक्ट या बाधा बॉडी को हिट करती है। टकराने के बाद यह वस्तु की सतह पर वापस उछलेगा।
एक बार परावर्तित तरंग संवेदक प्राप्त करने वाले छोर पर वापस पहुंच जाती है, इको पिन पर एक सिग्नल पल्स उत्पन्न हो जाएगा। ESP32 इको पिन सिग्नल प्राप्त करता है और ऑब्जेक्ट और सेंसर के बीच की दूरी की गणना करता है दूरी-सूत्र।

गणना की गई कुल दूरी को ESP32 कोड के अंदर दो से विभाजित किया जाना चाहिए क्योंकि मूल रूप से हमें जो दूरी मिलती है वह सेंसर से ऑब्जेक्ट की कुल दूरी और वापस सेंसर प्राप्त करने के अंत के बराबर होती है। तो वास्तविक दूरी वह संकेत है जो उस दूरी के आधे के बराबर है।
ढांच के रूप में
अल्ट्रासोनिक सेंसर के साथ ESP32 को इंटरफेस करने के लिए निम्नलिखित योजनाबद्ध है:
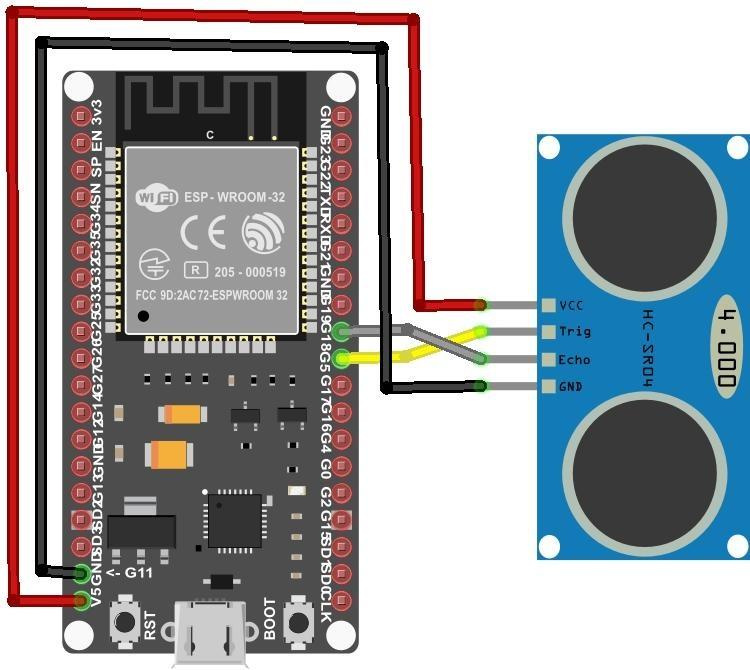
सेंसर के ट्रिगर और इको पिन को क्रमशः GPIO 5 और ESP32 के GPIO 18 से कनेक्ट करें। ESP32 GND और Vin पिन को सेंसर पिन से भी कनेक्ट करें।
| HC-SR04 अल्ट्रासोनिक सेंसर | ESP32 पिन |
| ट्रिग | जीपीआईओ 5 |
| गूंज | जीपीआईओ 18 |
| जीएनडी | जीएनडी |
| वीसीसी | आइए |
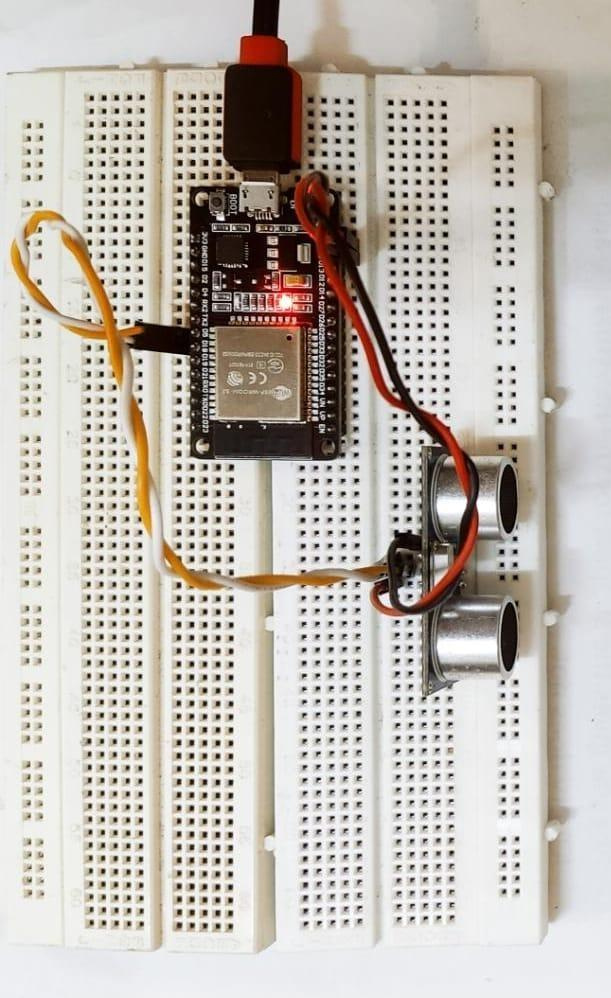
हार्डवेयर
अल्ट्रासोनिक सेंसर को प्रोग्राम करने के लिए निम्नलिखित घटकों की आवश्यकता होती है:
- ESP32
- कोर्ट-SR04
- ब्रेड बोर्ड
- जम्पर तार
MicroPython का उपयोग करके ESP32 के साथ अल्ट्रासोनिक HC-SR04 कैसे सेटअप करें
इससे पहले कि हम ESP32 को एक अल्ट्रासोनिक सेंसर के साथ प्रोग्राम कर सकें, हमें इसमें एक लाइब्रेरी स्थापित करने की आवश्यकता है। ESP32 बोर्ड को पीसी से कनेक्ट करें। MicroPython का उपयोग करके Thonny IDE में अल्ट्रासोनिक सेंसर के साथ ESP32 कॉन्फ़िगरेशन को पूरा करने के लिए चरणों का पालन करें।
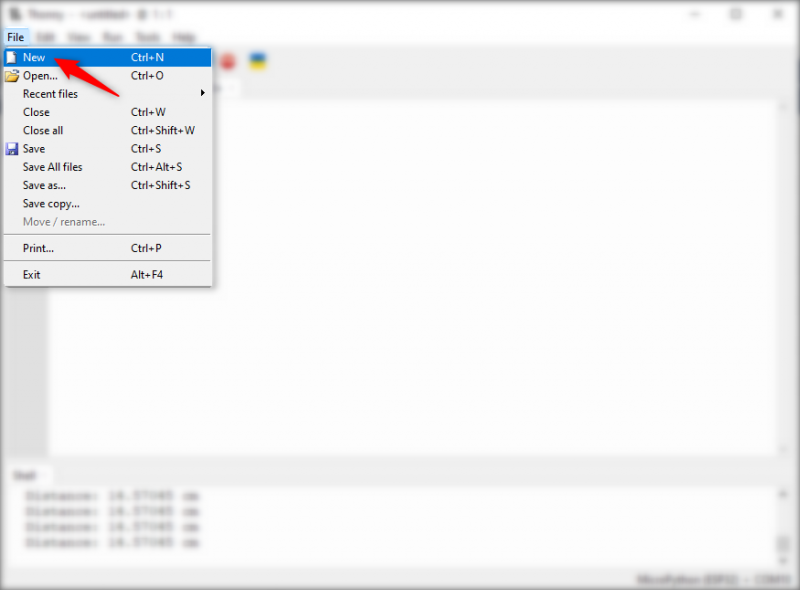
स्टेप 1: अब थोंनी आईडीई खोलें। एडिटर विंडो में एक नई फाइल बनाने के लिए जाएं : फ़ाइल>नया या दबाएं सीटीआरएल + एन .
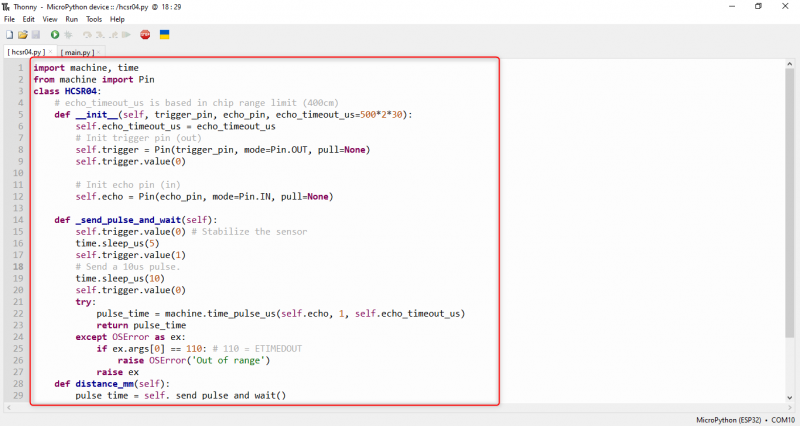
एक बार नई फ़ाइल खुल जाने के बाद, निम्न कोड को Thonny IDE एडिटर विंडो में पेस्ट करें।
आयात मशीन , समयसे मशीन आयात नत्थी करना
कक्षा एचसीएसआर04:
# Echo_timeout_us चिप रेंज लिमिट (400cm) पर आधारित है
डीईएफ़ __गरम__ ( खुद , ट्रिगर_पिन , इको_पिन , echo_timeout_us = 500 * दो * 30 ) :
खुद . echo_timeout_us = echo_timeout_us
# इनिट ट्रिगर पिन (बाहर)
खुद . चालू कर देना = नत्थी करना ( ट्रिगर_पिन , तरीका = नत्थी करना। बाहर , खींचना = कोई भी नहीं )
खुद . चालू कर देना . मूल्य ( 0 )
# इनिट इको पिन (इन)
खुद . गूंज = नत्थी करना ( इको_पिन , तरीका = नत्थी करना। में , खींचना = कोई भी नहीं )
डीईएफ़ _send_pulse_and_wait ( खुद ) :
खुद . चालू कर देना . मूल्य ( 0 ) # सेंसर को स्थिर करें
समय . हमें सो जाओ ( 5 )
खुद . चालू कर देना . मूल्य ( 1 )
# 10us पल्स भेजें।
समय . हमें सो जाओ ( 10 )
खुद . चालू कर देना . मूल्य ( 0 )
प्रयत्न :
पल्स_टाइम = मशीन। time_pulse_us ( खुद . गूंज , 1 , खुद . echo_timeout_us )
वापसी पल्स_टाइम
के अलावा ओएसत्रुटि जैसा भूतपूर्व:
यदि भूतपूर्व। तर्क [ 0 ] == 110 : # 110 = ETIMEDOUT
उठाना ओएसत्रुटि ( 'सीमा से बाहर' )
उठाना भूतपूर्व
डीईएफ़ दूरी_मिमी ( खुद ) :
पल्स_टाइम = खुद ._send_pulse_and_wait ( )
मिमी = पल्स_टाइम * 100 // 582
वापसी मिमी
डीईएफ़ दूरी_सेमी ( खुद ) :
पल्स_टाइम = खुद ._send_pulse_and_wait ( )
मुख्यमंत्रियों = ( पल्स_टाइम / दो ) / 29.1
वापसी मुख्यमंत्रियों
चरण दो: लिखने के बाद पुस्तकालय संपादक विंडो के अंदर कोड अब हमें इसे MicroPython डिवाइस के अंदर सहेजना होगा।
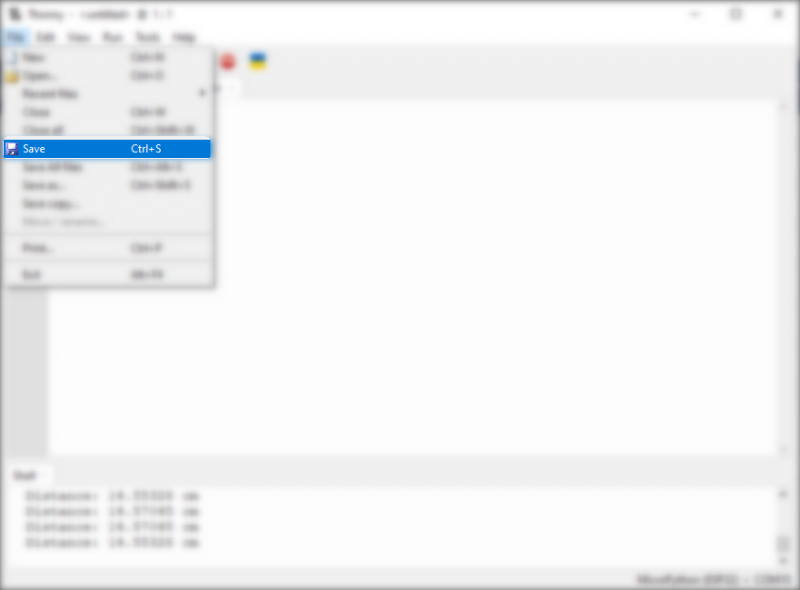
चरण 3: के लिए जाओ : फ़ाइल> सहेजें या दबाएं सीटीआरएल + एस .
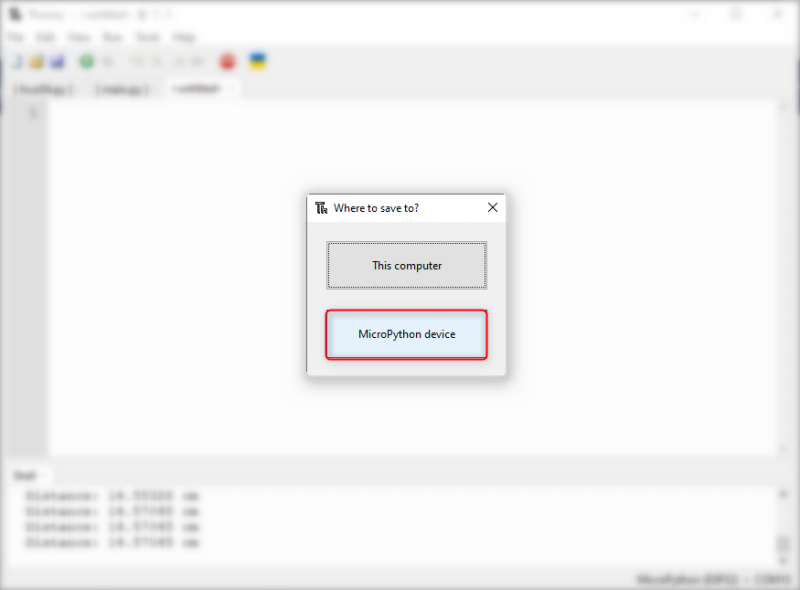
चरण 4: एक नई विंडो खुलकर आएगी। सुनिश्चित करें कि ESP32 पीसी के साथ जुड़ा हुआ है। लाइब्रेरी फ़ाइल को सहेजने के लिए MicroPython डिवाइस का चयन करें।
चरण 5: नाम के साथ अल्ट्रासोनिक लाइब्रेरी फाइल को सेव करें hcsr04.py और क्लिक करें ठीक है .

अब अल्ट्रासोनिक hcsr04 सेंसर लाइब्रेरी को ESP32 बोर्ड में सफलतापूर्वक जोड़ा गया है। अब हम विभिन्न वस्तुओं की दूरी को मापने के लिए पुस्तकालय कार्यों को कोड के अंदर कॉल कर सकते हैं।
MicroPython का उपयोग करके अल्ट्रासोनिक सेंसर के लिए कोड
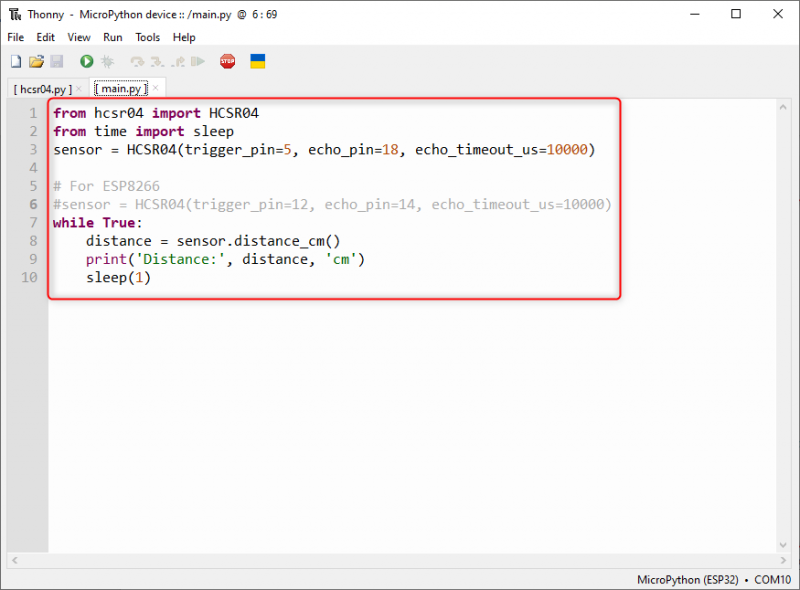
अल्ट्रासोनिक सेंसर कोड के लिए एक नई फाइल बनाएं ( सीटीआरएल + एन ). संपादक विंडो में, नीचे दिए गए कोड को दर्ज करें और इसे main.py या boot.py फ़ाइल। यह कोड HC-SR04 के सामने आने वाली किसी भी वस्तु की दूरी को प्रिंट करेगा।
कोड महत्वपूर्ण पुस्तकालयों जैसे कॉल करके शुरू हुआ एचसीएसआर04 तथा समय साथ में पुस्तकालय सोना देरी देना।
अगला, हमने एक नाम के साथ एक नई वस्तु बनाई सेंसर . यह ऑब्जेक्ट तीन अलग-अलग तर्क ले रहा है: ट्रिगर, इको और टाइमआउट। यहां टाइमआउट को सेंसर के सीमा से बाहर जाने के बाद के अधिकतम समय के रूप में परिभाषित किया गया है।
सेंसर = एचसीएसआर04 ( ट्रिगर_पिन = 5 , इको_पिन = 18 , echo_timeout_us = 10000 )दूरी को मापने और बचाने के लिए एक नई वस्तु का नाम दिया गया है दूरी बनाया गया है। यह वस्तु सेमी में दूरी बचाएगी।
दूरी = सेंसर। दूरी_सेमी ( )मिमी में डेटा प्राप्त करने के लिए निम्न कोड लिखें।
दूरी = सेंसर। दूरी_मिमी ( )इसके बाद, हमने परिणाम को MicroPython IDE शेल पर प्रिंट किया।
प्रिंट ( 'दूरी:' , दूरी , 'सेमी' )अंत में 1 सेकंड की देरी दी जाती है।
सोना ( 1 )पूरा कोड नीचे दिया गया है:
से hcsr04 आयात एचसीएसआर04से समय आयात सोना
# ईएसपी32
सेंसर = एचसीएसआर04 ( ट्रिगर_पिन = 5 , इको_पिन = 18 , echo_timeout_us = 10000 )
# ईएसपी8266
#सेंसर = एचसीएसआर04 (ट्रिगर_पिन = 12, इको_पिन = 14, इको_टाइमआउट_स = 10000)
जबकि सत्य :
दूरी = सेंसर। दूरी_सेमी ( )
प्रिंट ( 'दूरी:' , दूरी , 'सेमी' )
सोना ( 1 )
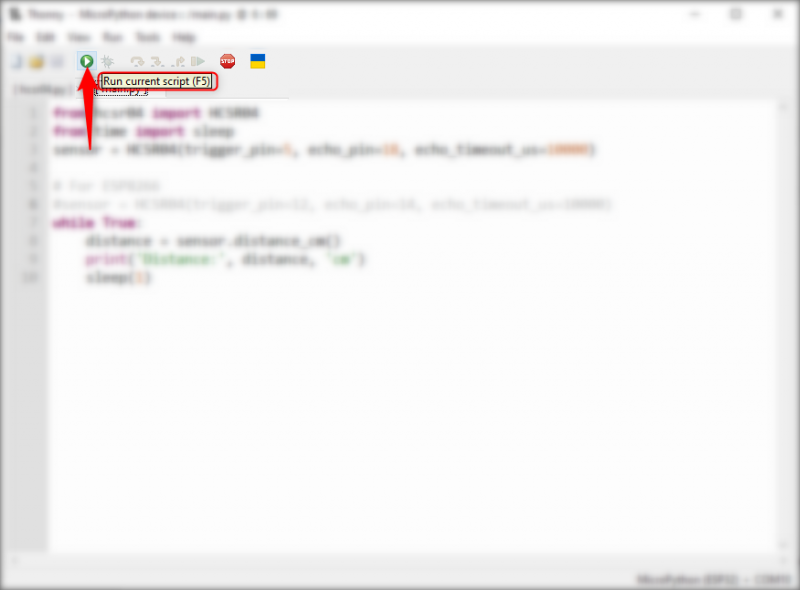
MicroPython डिवाइस के अंदर कोड लिखने और सहेजने के बाद, मैं अब अल्ट्रासोनिक सेंसर चलाता हूं main.py फ़ाइल कोड। प्ले बटन पर क्लिक करें या दबाएं F5 .
ऑब्जेक्ट के पास होने पर अल्ट्रासोनिक सेंसर का आउटपुट
अब अल्ट्रासोनिक सेंसर के पास एक वस्तु रखें और Arduino IDE के सीरियल मॉनिटर विंडो पर मापी गई दूरी की जांच करें।
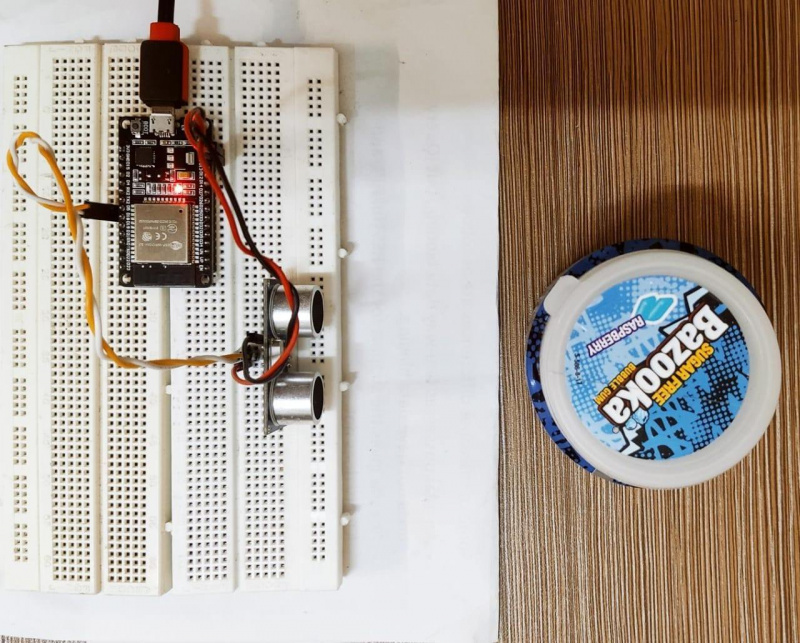
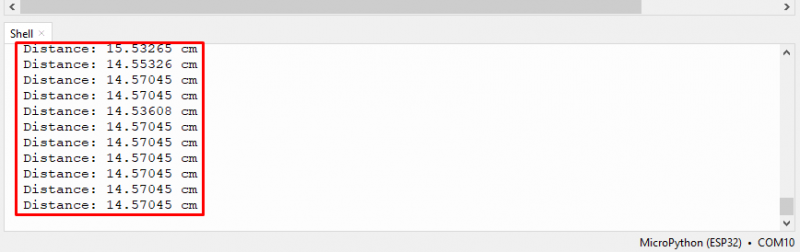
वस्तु की दूरी को शेल टर्मिनल में दिखाया गया है। अब ऑब्जेक्ट को अल्ट्रासोनिक सेंसर से 5 सेमी की दूरी पर रखा गया है।

ऑब्जेक्ट दूर होने पर अल्ट्रासोनिक सेंसर का आउटपुट
अब अपने परिणाम को सत्यापित करने के लिए हम वस्तुओं को सेंसर से दूर रखेंगे और अल्ट्रासोनिक सेंसर की कार्यप्रणाली की जांच करेंगे। नीचे दी गई छवि में दिखाए गए ऑब्जेक्ट को रखें:
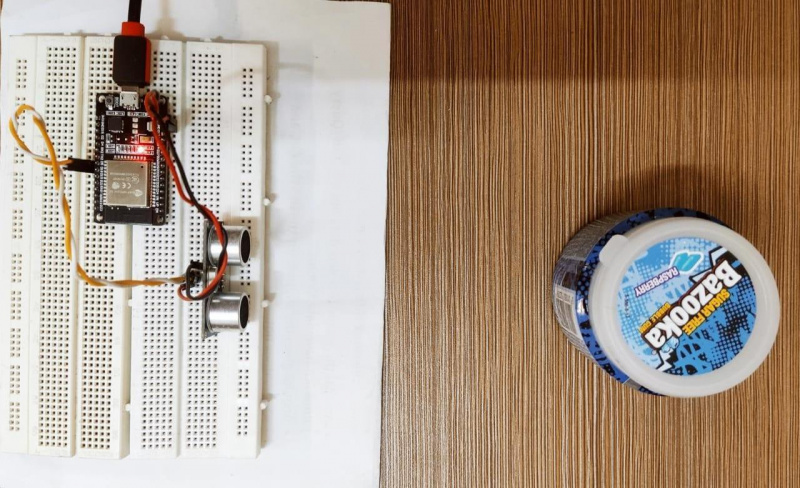
आउटपुट विंडो हमें एक नई दूरी देगी और जैसा कि हम देख सकते हैं कि वस्तु सेंसर से दूर है, इसलिए मापी गई दूरी लगभग है। अल्ट्रासोनिक सेंसर से 15 सेमी।
निष्कर्ष
जब रोबोटिक्स और अन्य परियोजनाओं की बात आती है तो दूरी को मापने का बहुत अच्छा उपयोग होता है, दूरी को मापने के विभिन्न तरीके हैं। ESP32 के साथ HC-SR04 विभिन्न वस्तुओं की दूरी को माप सकता है। यहां यह राइटअप ESP32 के साथ दूरी को मापने और एकीकृत करने के लिए आवश्यक सभी चरणों को कवर करेगा।